From Omzlo Electronics:
A Raspberry Pi CAN-bus HAT for the Omzlo IoT platform
In a previous blog post, we described “SKWARE” our revised Arduino-compatible IoT modules. These nodes are designed to be connected together in a daisy-chain fashion with a single cable that brings both DC power and CAN-bus networking. The voltage transported in the cables is not 5V (or 3.3V) but rather 12V or 24V to work more comfortably over long distances, potentially reaching 300 meters (1000 feet). You can think of it as a poor-man’s PoE.
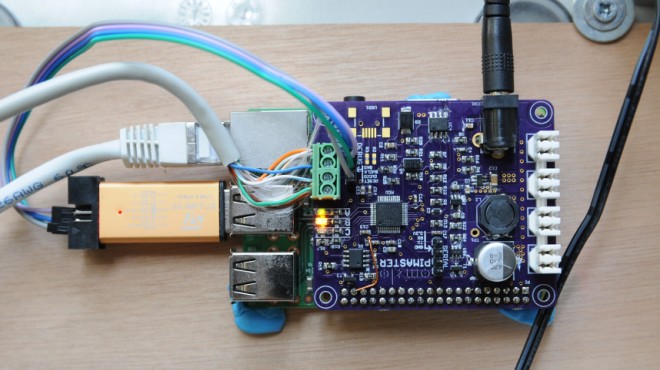
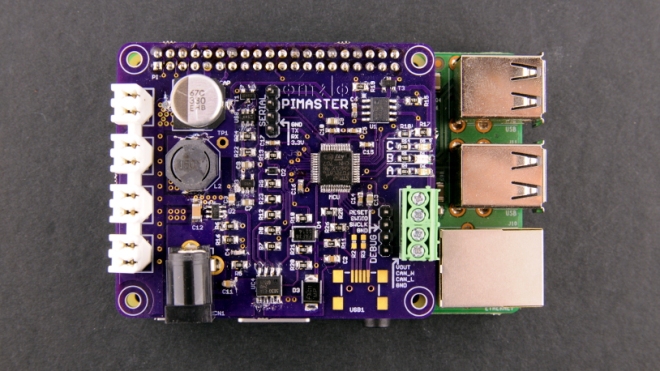
This network of connected nodes is designed to be monitored and controlled by a “master node”, which injects the necessary 12V/24V DC, provides node management services and a web interface for network administration. While the IoT nodes are based on an Arduino-style microcontroller, the “master node” requires a bit more power. In this context, the ubiquitous Raspberry Pi with its GPIO header seems like an ideal candidate for that role and we decided to see if we could build a “master node” by augmenting a Raspberry Pi with an appropriate add-on board. These add-on boards are called “HATs” (for “Hardware Attached on Top”) and we called our first prototype the “Pi Master HAT”.
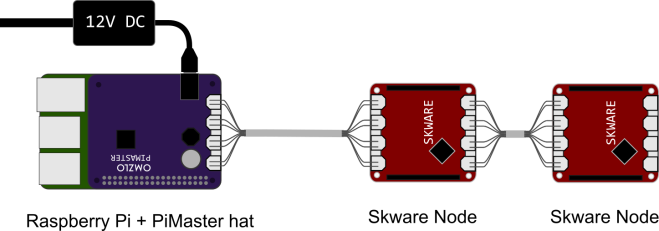
The drawing below illustrates the general structure of our network. A Raspberry Pi equipped with our “Pi Master HAT” controls a network of 2 (or more) daisy-chained nodes, like the SKWARE.