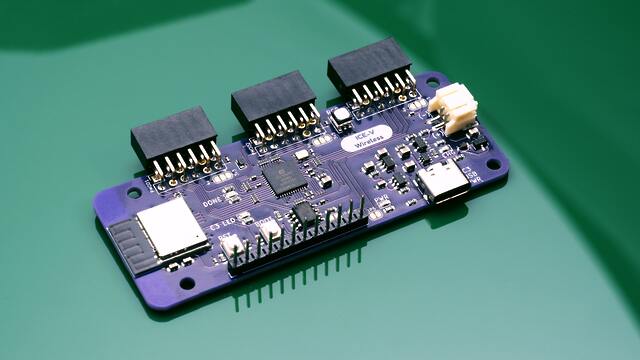
Another round of ICE-V Wireless boards by Michael Welling of QWERTY Embedded is now being offered on GroupGets. The design combines the ICE40UP5K FPGA with a wireless interface driven by ESP32-C3.
Photo of an assembled ICE-V Wireless board
Featured in Make: Magazine’s 2022 Guide to Boards!
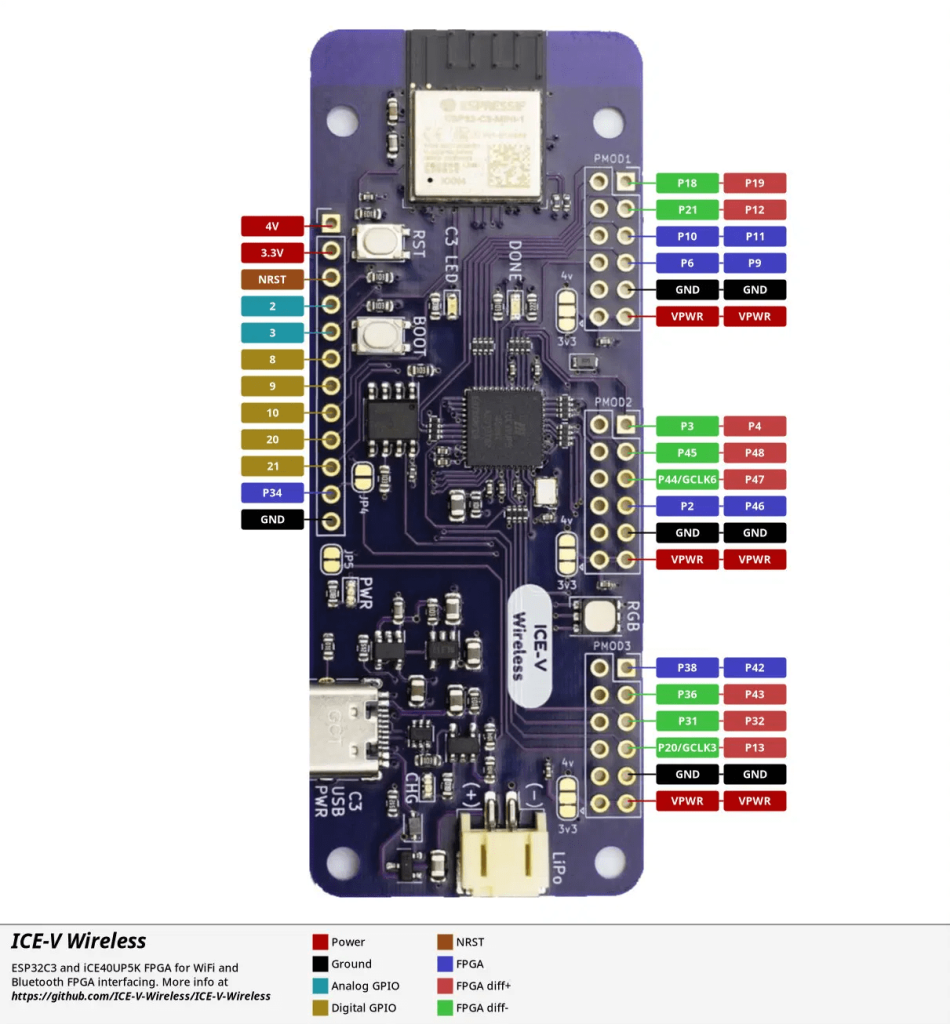
ICE-V Wireless is an ICE40UP5K+ESP32-C3 development board, allowing Wi-Fi and Bluetooth control of the the FPGA by combining an Espressif ESP32C3HN4 SoC with a Lattice iCE40 FPGA. Additionally, several ESP32C3 GPIO pins are available for additional interfaces, such as serial, ADC, or I2C.
The OSH Park team had a great time at Teardown in 2018 and 2019. This conference for hacking, discovering, and sharing hardware finally returns this June!
Teardown is about the practice of hardware: prototyping, manufacturing, testing, disassembling, and circumventing, all while having fun. Leave the marketing glitz and talk of venture capital at the door and come prepared to learn and teach. See the full schedule of the previous Teardown held in 2019 or watch the recap video
Just the Facts
Who?
Anyone interested in hardware: engineers, designers, artists, students, teachers…
What?
A three-day line up of talks, workshops, demos, installations, and puzzles
When?
Friday – Sunday, June 23 – 25, 2023
Where?
Beautiful Portland, Oregon on the campus of Portland State University
Why?
Shipping great hardware to you is rewarding, but we miss seeing you in person
How?
With lots of help from our friends, including our partner, CETI
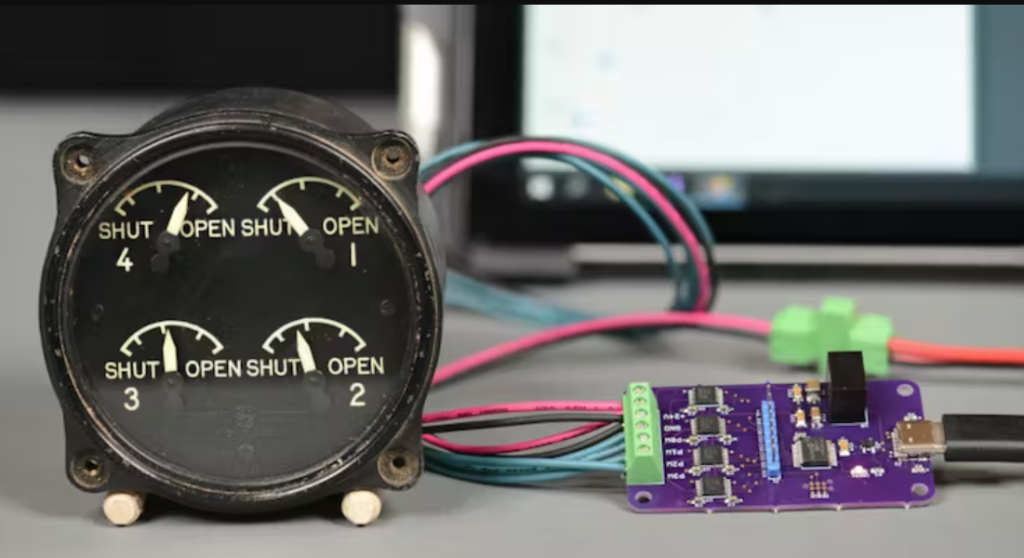
“This project is reminiscent of my USB analog panel meters project but the drive circuitry is significantly less complex. This post starts with a look at the engine cowl indicator, it’s theory of operation, and some ideas to control it using modern electronics. The post then covers the design of the board, the software for the microcontroller, and a Visual Studio C# .NET Windows Forms app for controlling the indicators from a PC.”
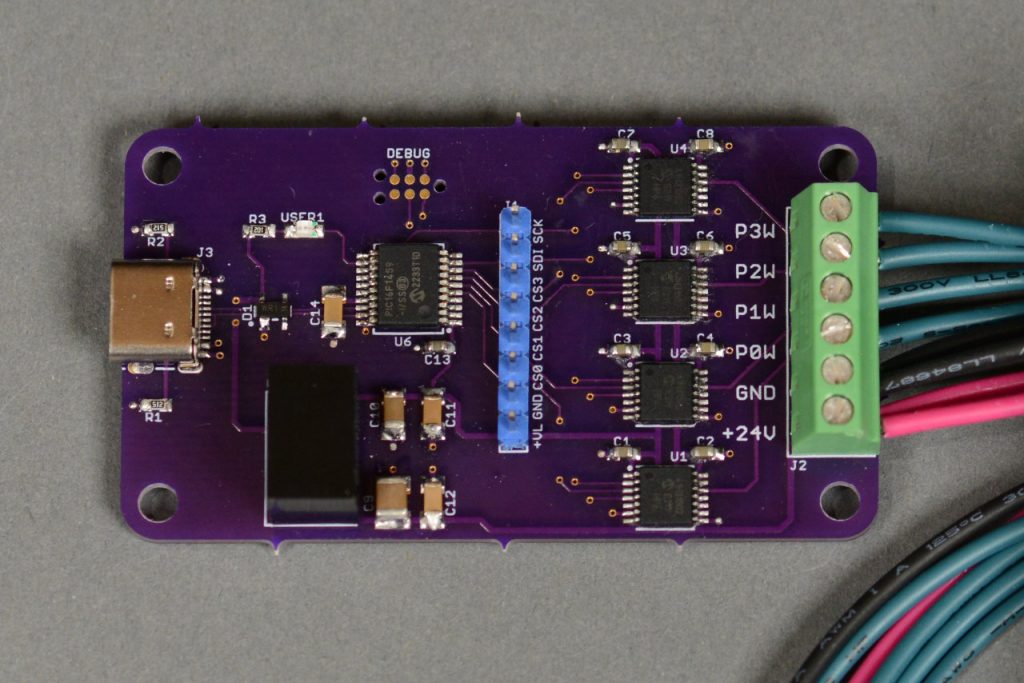
“The completed and assembled board. The board features a USB 2.0 Type C connector, a PIC16F1459, four MCP41HV31 digital potentiometers, and a screw terminal strip to connect to power and the indicator.”
“The video above is a quick demonstration of the indicator in use. The indicator is connected to the USB controller board and the USB controller board is connected to my Surface. The .NET Forms app is running and superimposed over the video. As I slide the sliders in the app, the corresponding dial moves on the indicator.”
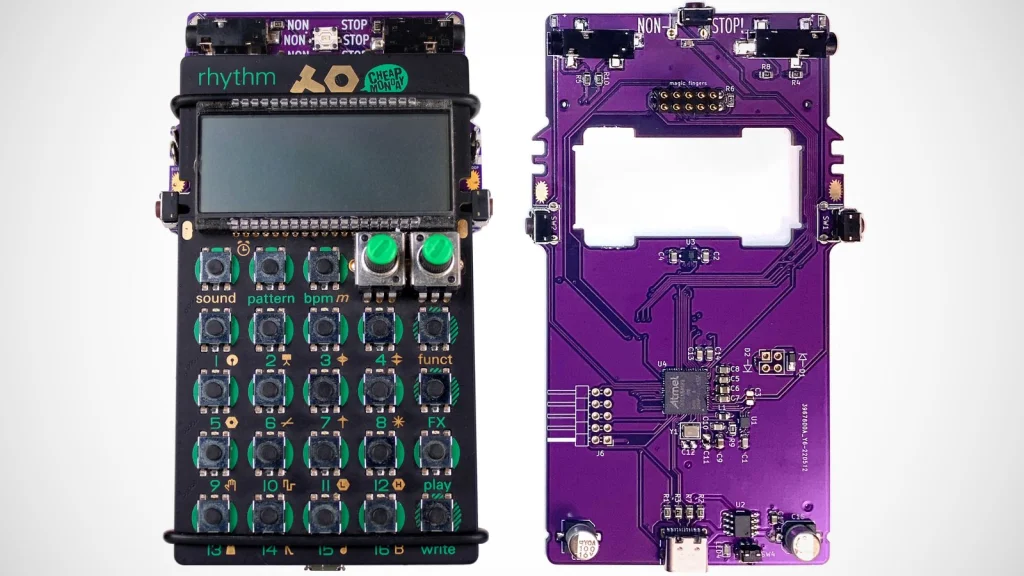
The Pocket Integrator is add-on board for Teenage Engineering’s Pocket Operators that lets you play your drum machine like a drum:
Synchronizing your electronic instruments with live music can be hard. Pocket Integrator makes it easy! It’s an add-on board for Teenage Engineering’s Pocket Operator series of hand-held drum machines, that lets you play them like a drum.
Just tap or shake to set the tempo and downbeat of your drum pattern. Keep tapping as long as you like. When you stop, it’ll hold the beat wherever you set it. It’s as easy as clapping your hands!
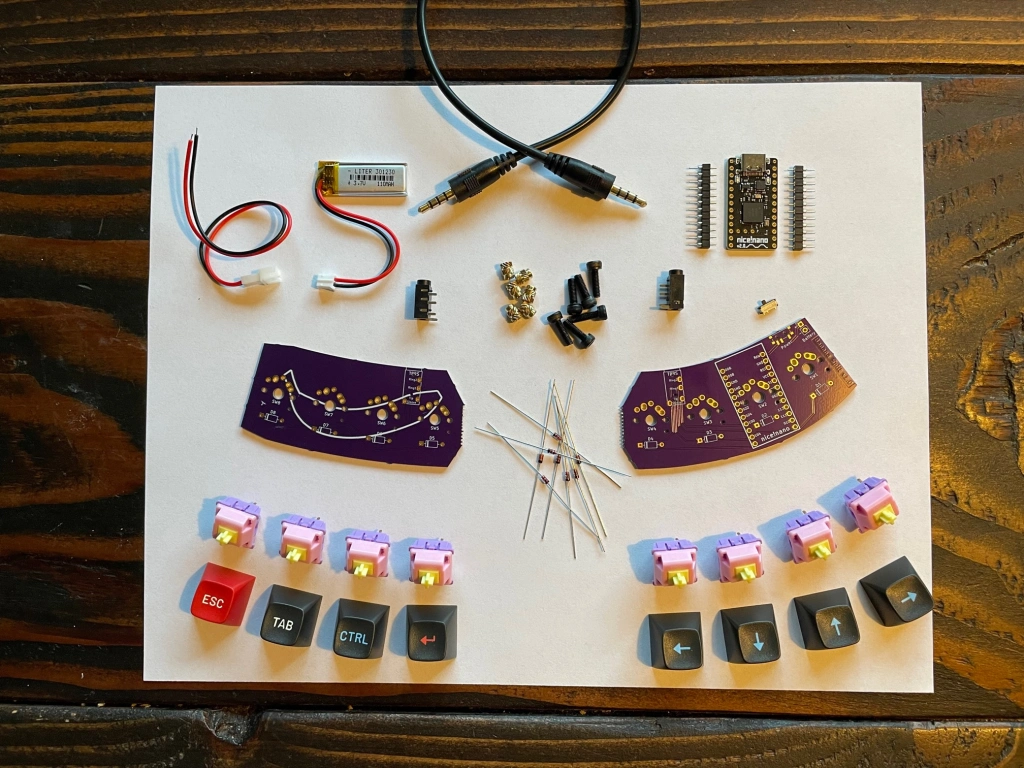
We see a lot of macropads around here and so we only feature those that stand out — usually those that incorporate interesting features or that contain unusual hardware. Aesthetics alone aren’t enough to warrant a full write-up unless the device is particularly polished. But the Banana Split, a banana-themed wireless split macropad, is just too delicious to pass up.
After a two-year hiatus, the Hackaday Superconference is returning live for another three days of technical talks, badge hacking, and hands-on workshops.
Interested in giving a talk or workshop? Fill out the following form and we will review your proposal. Proposals deadline has been extended to September 1st, 2022.
Wondering what to submit? Check out our Youtube playlist of 2019’s talks for what we accepted last Superconference. You can view talk titles in the right sidebar so you don’t need to watch every video, although they’re all fantastic! But don’t limit yourself to the beaten path! We love to get proposals for hacks that we haven’t even dreamt of.
We have two presentation tracks, one for shorter talks and another for longer ones. If you’re a first-time presenter or simply have a shorter hack, the 20-minute track is for you. Or spread out a little bit and go into detail with a 45-minute talk.
Workshops are usually one to two hours. Let us know how much time you need.
Best of luck to you, we hope to see you in person to hear about your project this year!
After two years in remote mode, we’re very excited to announce that this year’s Hackaday Supercon will be coming back, live! Join us Nov. 4th, 5th, and 6th in sunny Pasadena, CA for three days of hacks, talks, and socializing with the Hackaday community. And we’d love to see and hear in person what you’ve been up to for the last two years – so start brainstorming what you’re going to talk about now and fill out the call for proposals.
Mykle Hansen designed this open hardware add-on board that lets you play your Pocket Operator drum machine like a maraca:
Pocket Integrator is a magical, musical add-on board for Teenage Engineering’s Pocket Operator drum machines. Using a MEMS accelerometer, it lets you play drum patterns and synthesizers by tapping and shaking, just like a handheld percussion instrument. Play your Pocket Operator like a drum!
Tap to set the tempo and downbeat. Keep tapping as long as you like. When you stop, it’ll hold the beat wherever you set it. It’s as easy as clapping your hands! (In fact, it’s like using your hands to clap another pair of hands that magically keep clapping after you stop clapping your hands.)
OSHWA recently announced a call for Open Hardware Trailblazer Fellows. Thanks to the generous support of the Alfred P. Sloan Foundation, OSHWA is taking a giant step towards expanding open source hardware in academia through the Open Hardware Trailblazer Fellows initiative. The one-year fellowship provides grants to individuals who are leading the way as open source hardware expands into academia. The fellows will document their experience of making open source hardware in academia to create a library of resources for others to follow.
The call was incredibly competitive. We received truly amazing submissions. The fellows were chosen by the program’s mentors and an OSHWA board selection committee.
Congratulations to the Open Hardware Trailblazer Fellows!