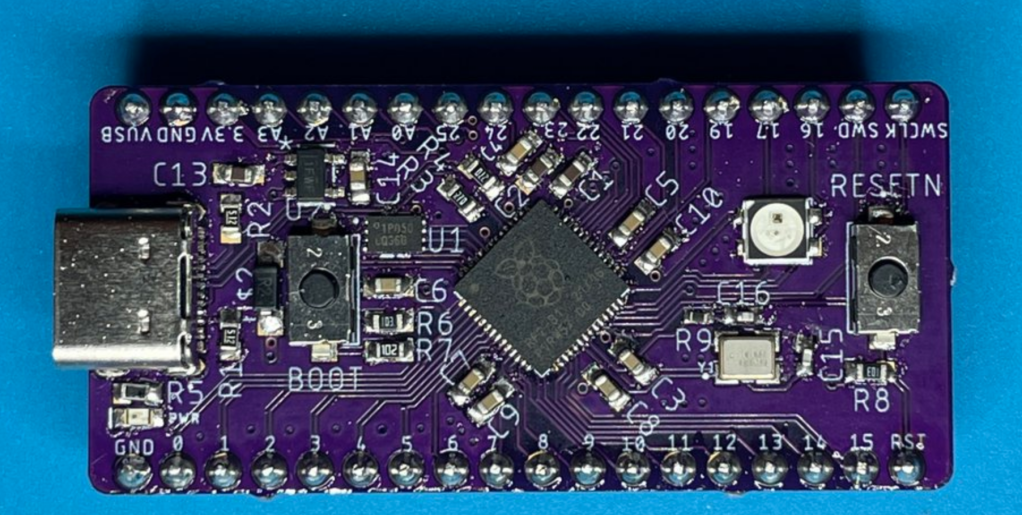
The BREAD 2040 from Oak Dev Tech is now on sale for only $6.76:
What is it?
BREAD 2040 is a compact and breadboard friendly development board which features the Raspberry Pi RP2040, a NeoPixel compatible SK6812mini, Reset button, and all GPIO and SWD pins broken out in an easily breadboard able design. No weird pins on the ends! This board is also CircuitPython compatible meaning you can develop your projects faster with python.
Why did you make it?
The BREAD2040 was designed in an inspirational burst of energy while watching the CircuitPython Day Adafruit Board Tour.
What makes it special?
The BREAD 2040 takes an old fashion approach to this design, keeping in mind bread board friendliness as well as providing modern USB style plugs with the USB Type-C connector.