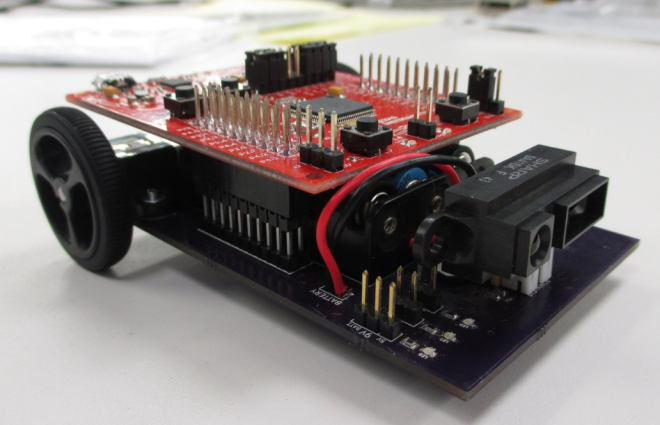
Sarah Petkus posts an update on her Robotic Arts blog about her NoodleFeet robot:
Noodle is Gettin’ Bean Feet!
This summer, I am once again diving into designing mechanical personality quirks. I’ll be investigating new and exciting ways for my robot, NoodleFeet to interact with the world. This time, my focus is the wet, tingly and preferential aspect of TASTE.
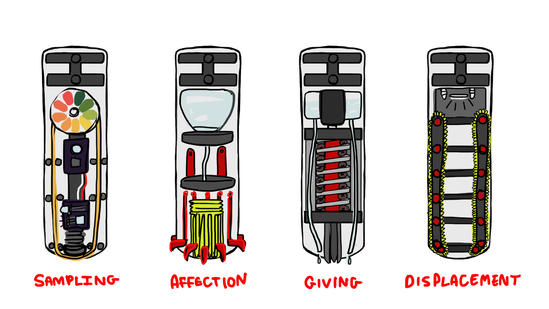
From now until the end of August, my goal is to produce four different tasting modules that each demonstrate some aspect of sampling or preference. You could think of them as the “four tasters of the apocalypse”




If you’re unfamiliar with Sarah and NoodleFeet, then check out here great talk from Hackaday Super Con: