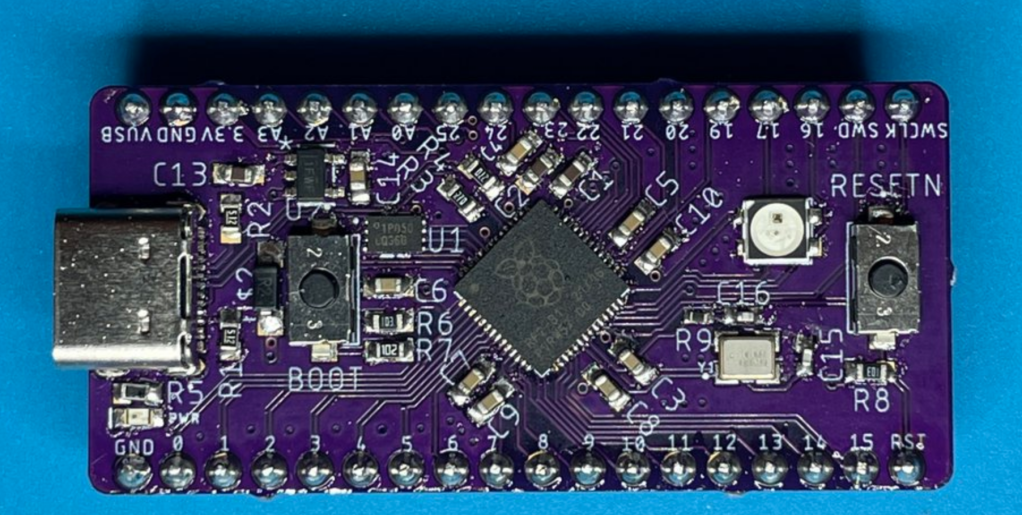
BREAD 2040 is a compact and breadboard friendly development board which features the Raspberry Pi RP2040, a NeoPixel compatible SK6812mini, Reset button, and all GPIO and SWD pins broken out in an easily breadboard able design. No weird pins on the ends! This board is also CircuitPython compatible meaning you can develop your projects faster with python.
Why did you make it?
The BREAD2040 was designed in an inspirational burst of energy while watching the CircuitPython Day Adafruit Board Tour.
What makes it special?
The BREAD 2040 takes an old fashion approach to this design, keeping in mind bread board friendliness as well as providing modern USB style plugs with the USB Type-C connector.
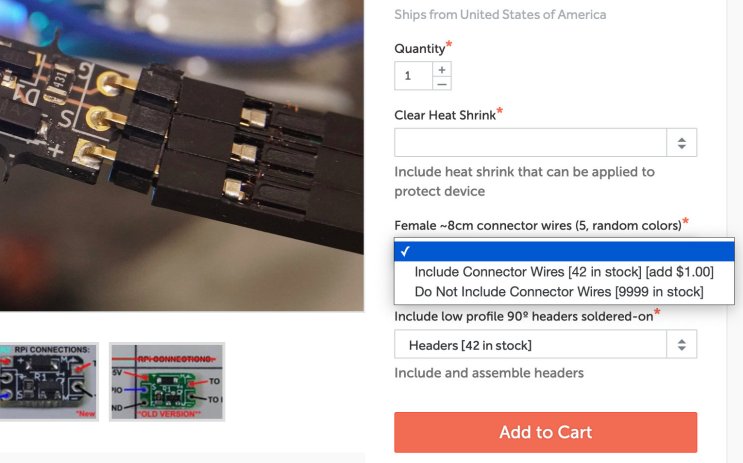
When you list a an item on Tindie, you can sell a basic product, and also add a variety of options. This could specify the color of a product’s enclosure, whether or not one would like a knob included, assembly, or any number of other services and add-ons. Some of these options may be important enough that you specify that a selection is required, however, there’s a bit of a gotcha here that may not be entirely obvious.
If you specify that a choice must be made, and if there’s only one choice specified, the buyer has to select it before making a purchase. So in the example below, the buyer is required to buy 90º headers, and has to make a choice between including clear heat shrink or not, as well whether or not to include connector wires.
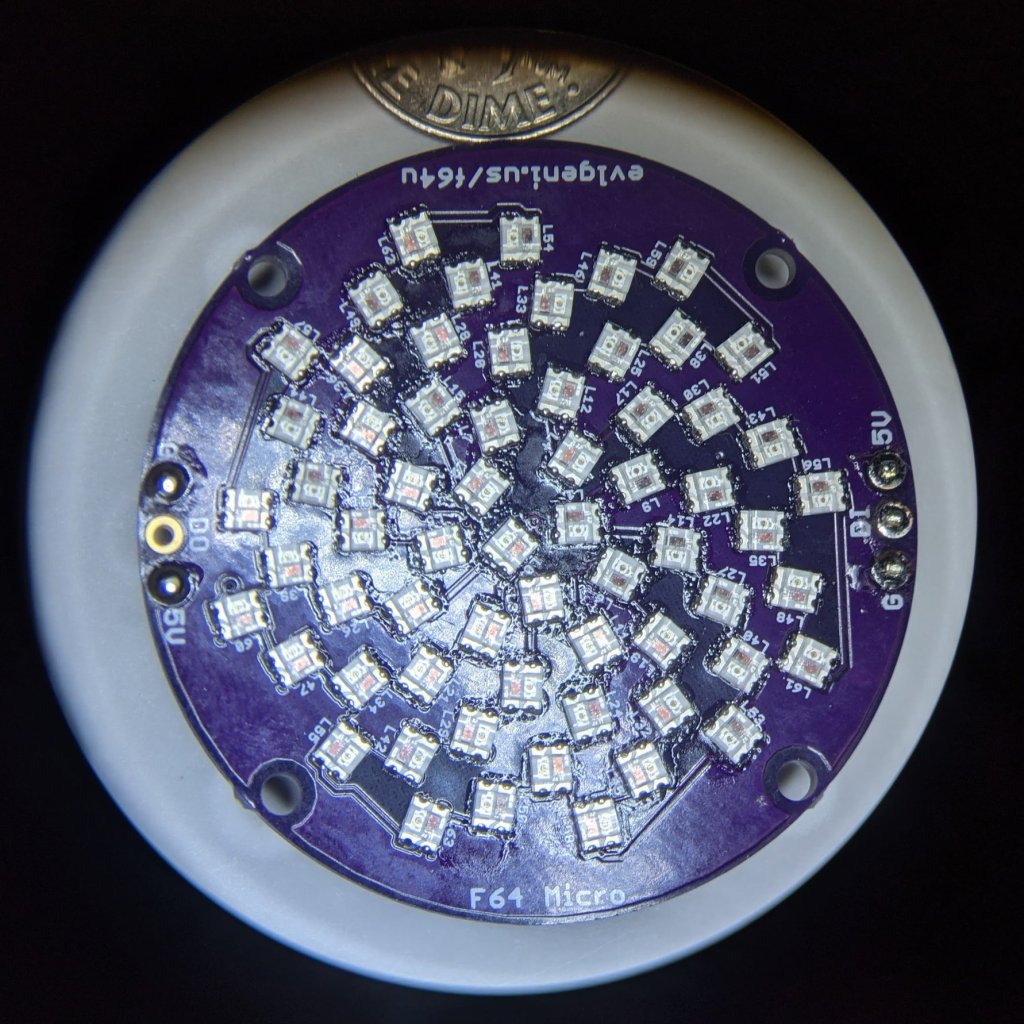
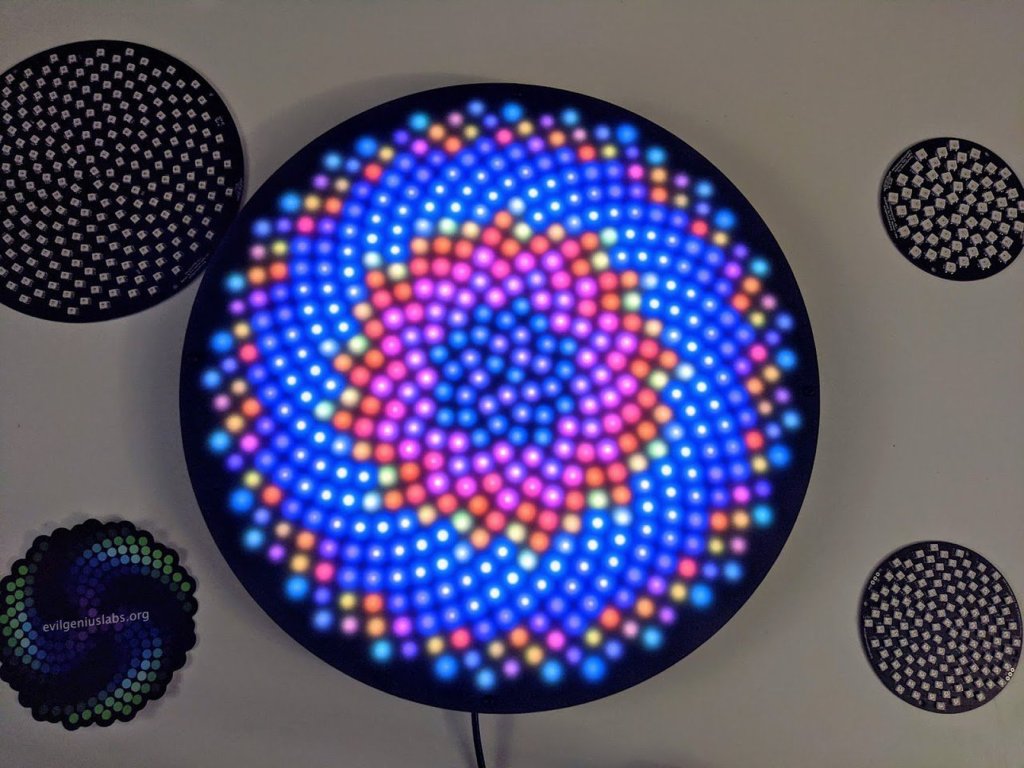
I have created several LED art pieces in Fibonacci patterns. They are all very labor intensive to create, and so are fairly expensive and limited in quantity. I wanted to come up with a Fibonacci layout that was at least slightly easier to create, and therefore more affordable.
I have RGB LEDs in just about every form they come: strips, strings, rings, discs, etc. The LEDs on most discs are arranged in very regular rings. Fibonacci64 is different. The LEDs are arranged in a Fibonacci distribution. The makes the layout very organic and seemingly messy. But with the proper animation, spiral patterns emerge with spectacular results.
The WS2812C-2020 each only consume a maximum of 5mA, and that’s at 100% brightness, solid white color. That’s only 320 mA for all 64 combined. They are still very bright, and I usually only run them at about 25% brightness. They’re perfect for wearables, powered with LiPo batteries.
This little cloud may look mean, but we promise it’s fun and easy to solder up!
This is a super fun and simple storm cloud blinky board. It has 3 self-flashing LEDs that act as the clouds lightning bolts! It also has an on/off switch and includes a CR2032 battery.
Why did you make it?
Robyn made this board for people to have a fun, easy project to learn how to solder. This is her second design and thought going with an angry storm cloud would be a fun opposite of the original happy rain cloud.
What makes it special?
This board was made using OSH Park’s After Dark Service so the black substrate and clear soldermask shows off the copper beautifully, check out the back! Please checkout Hackaday for solder instructions and more info! You can order 2 and follow our instructions on Hackaday on how to make them into a pair of flashy earrings!
Check out this new spin on our happy rain cloud board, the angry rain cloud ⛈️ It's made on @oshpark's after dark substrate! pic.twitter.com/7qQwbMnt03
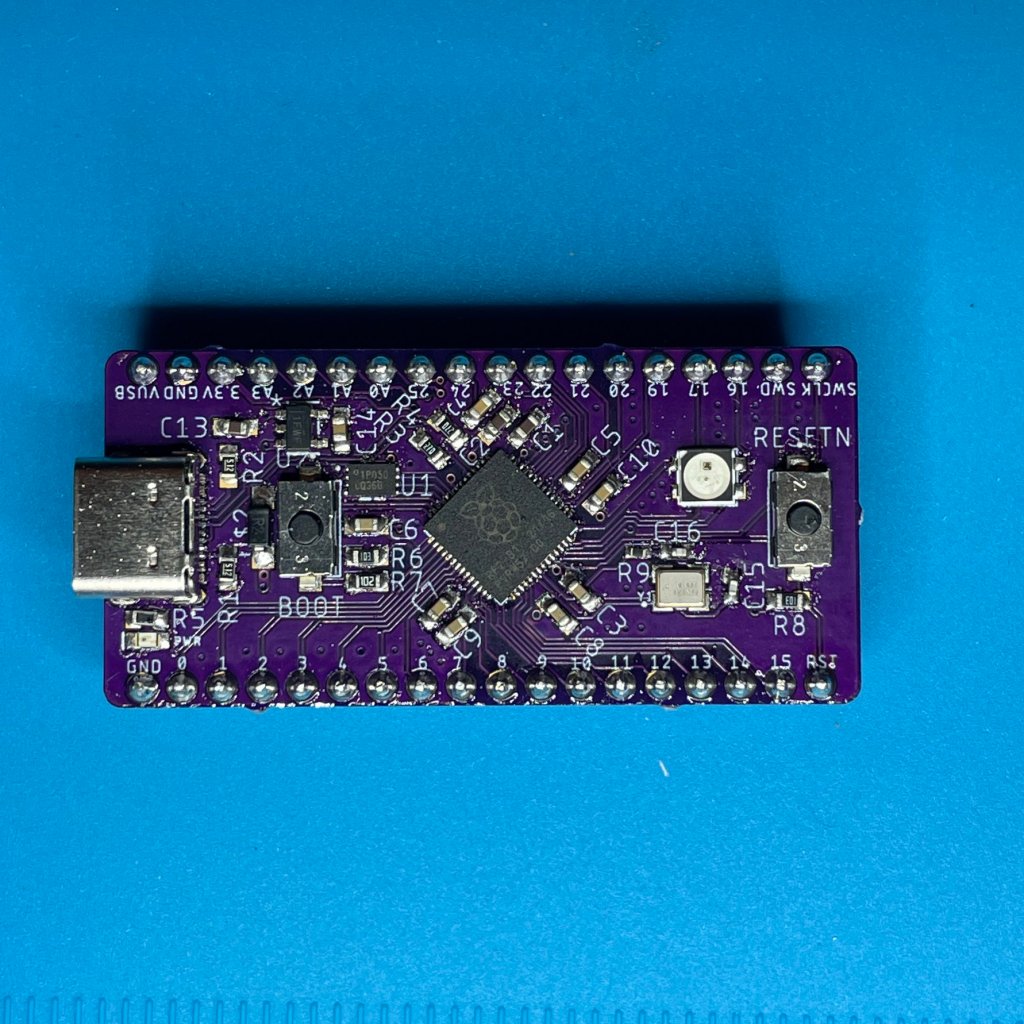
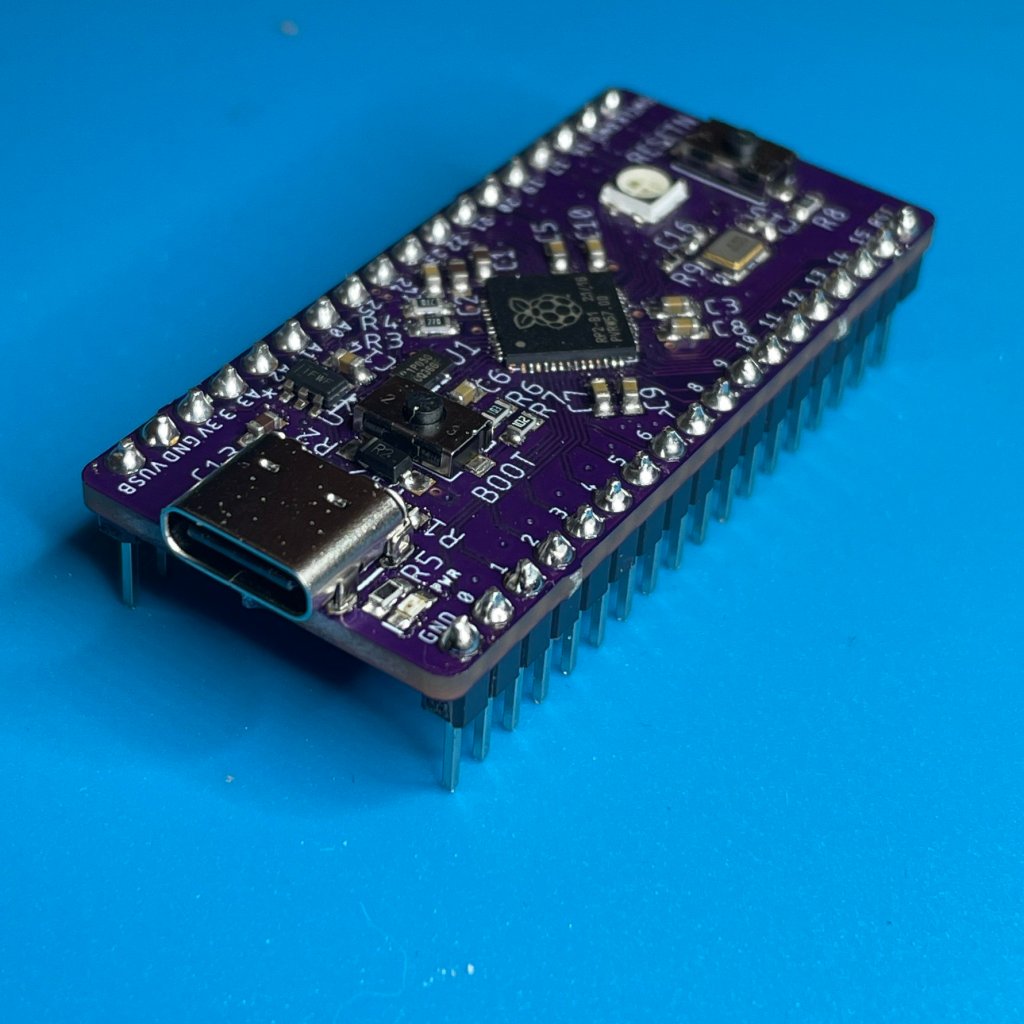
From OakDev Tech on Tindie, develop fun projects quickly with the BREAD 2040, a breadboard loving dev board:
BREAD 2040 is a compact and breadboard friendly development board which features the Raspberry Pi RP2040, a NeoPixel compatible SK6812mini, Reset button, and all GPIO and SWD pins broken out in an easily breadboard able design. No weird pins on the ends! This board is also CircuitPython compatible meaning you can develop your projects faster with python.
Why did you make it?
The BREAD2040 was designed in an inspirational burst of energy while watching the CircuitPython Day Adafruit Board Tour.
What makes it special?
The BREAD 2040 takes an old fashion approach to this design, keeping in mind bread board friendliness as well as providing modern USB style plugs with the USB Type-C connector.
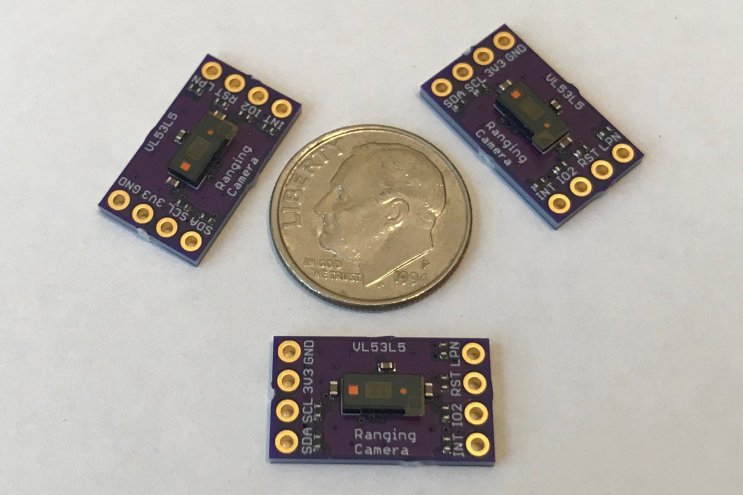
Electronics have improved exponentially over the years, to the point where today we carry what not too long ago would be considered a supercomputer – plus a robust sensor and communications suite with us as a ‘phone’. Such global improvement has the trickle-down effect that we can use these leaps in technology in our own projects, including the amazing STMicroelectronics VL53L5CX time-of-flight (ToF) sensor.
This ‘sensor’, as noted in Pesky Products’ breakout board listing, might better be described as a low-res camera, since it’s able to pick up on ToF data in an 8×8 grid. This resolution is good enough for gesture recognition, pose estimation (i.e. whether one is sitting, standing, or lying down), and much more, though it is limited enough to obscure detailed identifying information.
The ranging capability of the sensor is up to 400 cm, and the field of view is conspicuously rated at 61º. This means that a full 360º view could be covered, plus just a bit more with 6 sensors arranged around a robot or device. The sensor features a few additional tricks beyond sending pure range info, including the ability to calculate ‘motion intensity’, i.e. relative velocity, for each pixel.
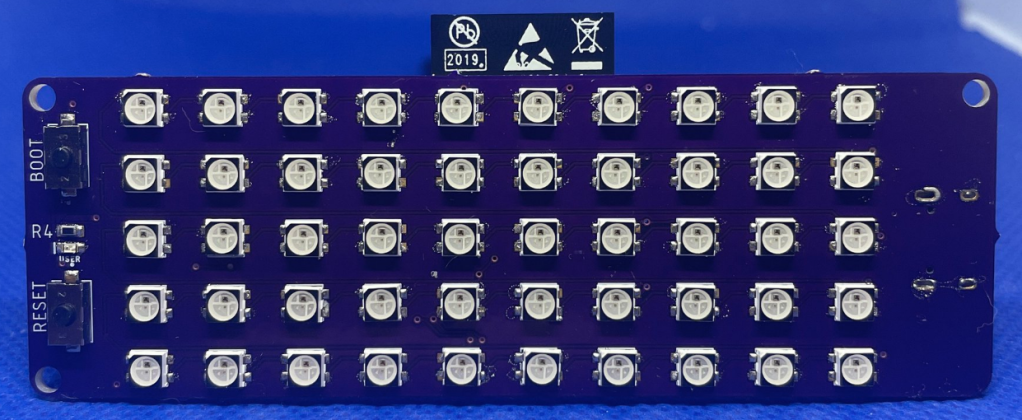
The PixelWing Matrix is a powerful ESP32-S2 RGB Matrix Display board that allows you to make a simple connected display, data logger, or environmental indicator. The PixelWing features USB-C power, a 5×10 RGB Matrix Display using SK6812mini Addressable LEDs that are compatible with Adafruit NEOPIXEL Libraries!
In addition to this, the PixelWing provides a quick access I2C JST connector that is compatible with Qwiic and Stemma QT connectors allowing you to connect all your favorite Adafruit and Sparkfun sensor breakouts.
All of this is combined with Circuit Python support making it easy to get programming on your project.
Sometime in the next 2ish weeks we’ll be bringing the PixelWing to our shop! We hope you’re ready! 🙂 if we hit 1000 followers by August 15th we’ll give 1 PixelWing to a lucky follower! 🙂 pic.twitter.com/vT3iLMByFA
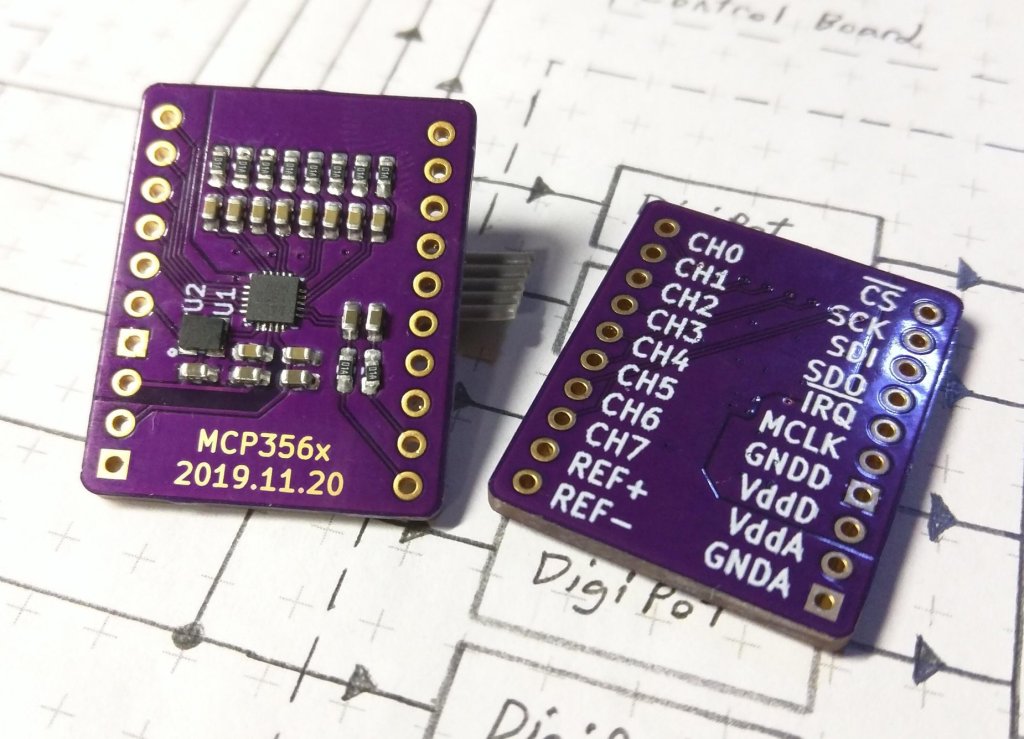
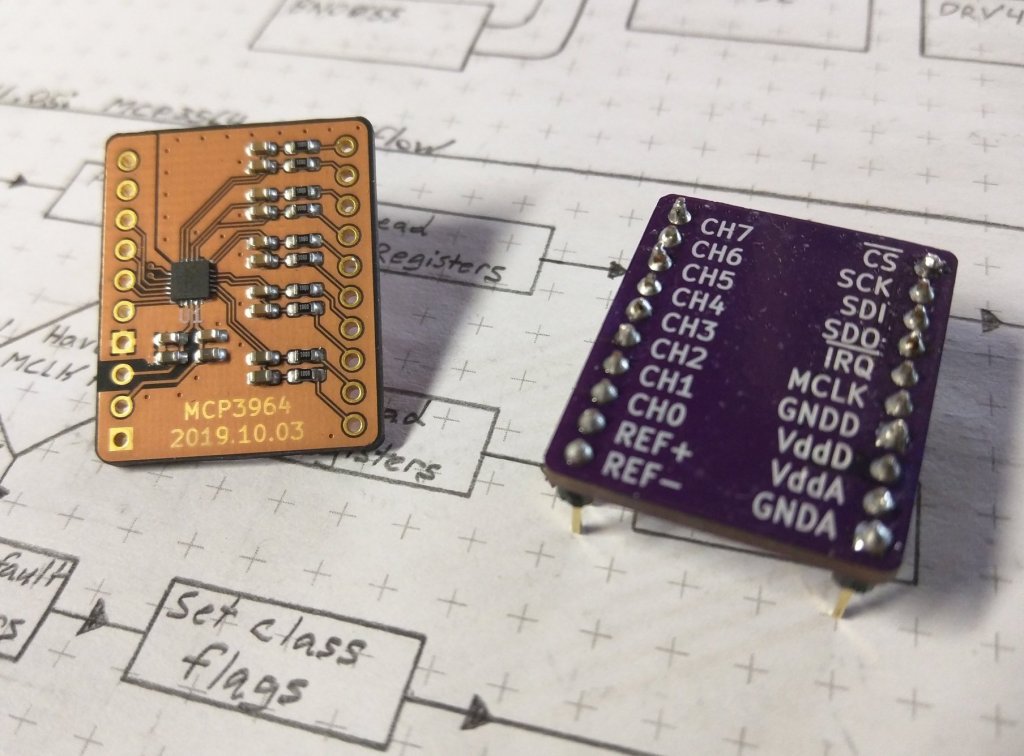
The MCP3564 is a 24-bit sigma-delta ADC with support for up to eight single-ended, or four differential channels. It supports extensive oversampling depths, flexible MUX front-end, circuit burnout detection, adjustable gain, Vref from [0v – 3.6v], and optional internal oscillator.
The board is available with or without high-accuracy external oscillator. If included, the oscillator frequency is fixed at the maximum rate for this part (19.6608 MHz).
Jeremy Cook created this tiny PCB for controlling small cooling fans or other motors:
What is it?
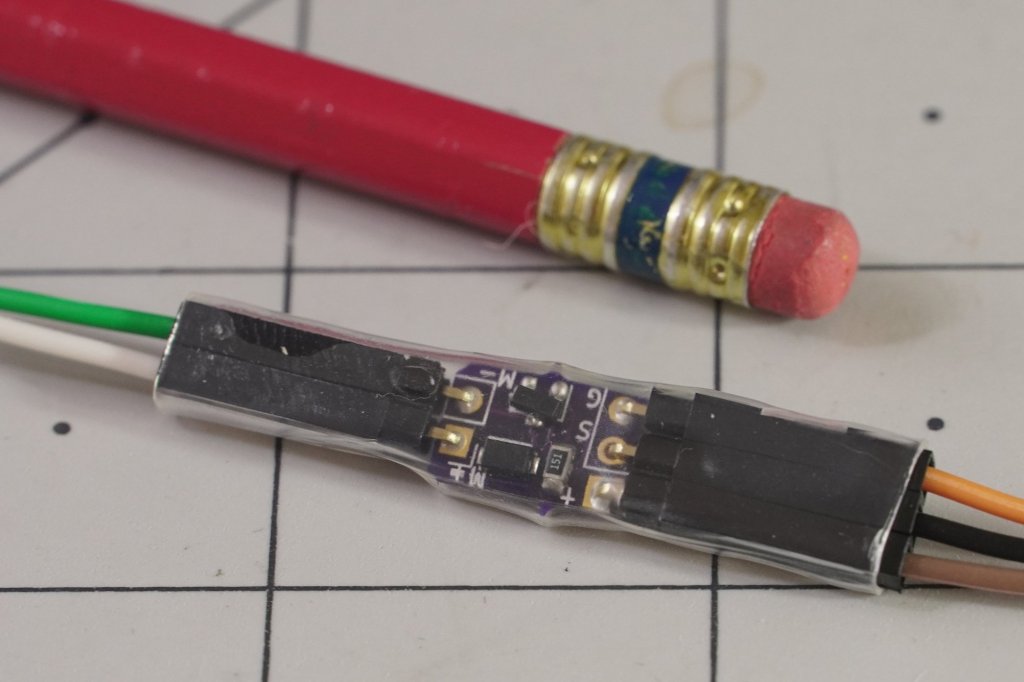
PCB originally designed to control cooling fans on Raspberry Pi boards, but can be used with other small motors or DC loads. Includes a flyback diode to safely dissipate inductive voltage spikes.
Can also work with Arduino and other such dev boards.Why did you make it?
Wanted a way to control cooling fans off of a Raspberry Pi. While some fans have PWM inputs, some do not and cannot normally be controlled. This transistor board works well with the GPIO fan control option in Raspberry Pi OS (which turns it fully on and fully off).
Not a full motor driver (i.e. it only drives in one direction) but can be used with other simple DC motors as well. Includes a resistor and flyback diode.
What makes it special?
It’s very, very small, even compared to a prior THT version. It should therefore be able to fit inside nearly any case. The optional 90º headers are even spec’d out to be low profile.
Boards come fully assembled with or without headers depending on the option selected, and appearance of the boards may vary. Options also available for female-female wires as needed, and/or clear heat shrink.
Fibonacci512 is a giant, beautiful 320mm circular disc with 512 RGB LEDs surface mounted in a Fibonacci distribution. Swirling and pulsing like a colorful galaxy, it’s mesmerizing to watch.
It consists of 512 WS2812B-Mini 3535 RGB LEDs, arranged into a circular Fermat’s spiral pattern.
I have created several LED art pieces in Fibonacci patterns. They are all very labor intensive to create, and so are fairly expensive and limited in quantity. I wanted to come up with a Fibonacci layout that was at least slightly easier to create, and therefore more affordable.
I have RGB LEDs in just about every form they come: strips, strings, rings, discs, etc. The LEDs on most discs are arranged in very regular rings. Fibonacci512 is different. The LEDs are arranged in a Fibonacci distribution. The makes the layout very organic and seemingly messy. But with the proper animation, spiral patterns emerge with spectacular results.
Each of the 512 WS2812B-Mini 3535 RGB LEDs has its own decoupling capacitor built in. The top and bottom of the PCB are large 5V and GND planes, to allow for the large amount of current required by the 512 LEDs. The PCB is split into four separate data lines to allow for higher frame rates when driven by a microcontroller that supports the FastLED library’s parallel output, such as ESP8266, ESP32, Teensy, etc. The max theoretical frame rate with four way parallel output is ~260 FPS. Each of the four data lines has a separate four-pin headers provided for 5V, Data In (to the section), Data Out (from the previous section) and GND. The last Data Out pin can be used to connect to even more LEDs. There are also small jumper solder pads that can be bridged to drive the whole panel with a single pin (max ~65 FPS), or two pins (max 130 FPS).