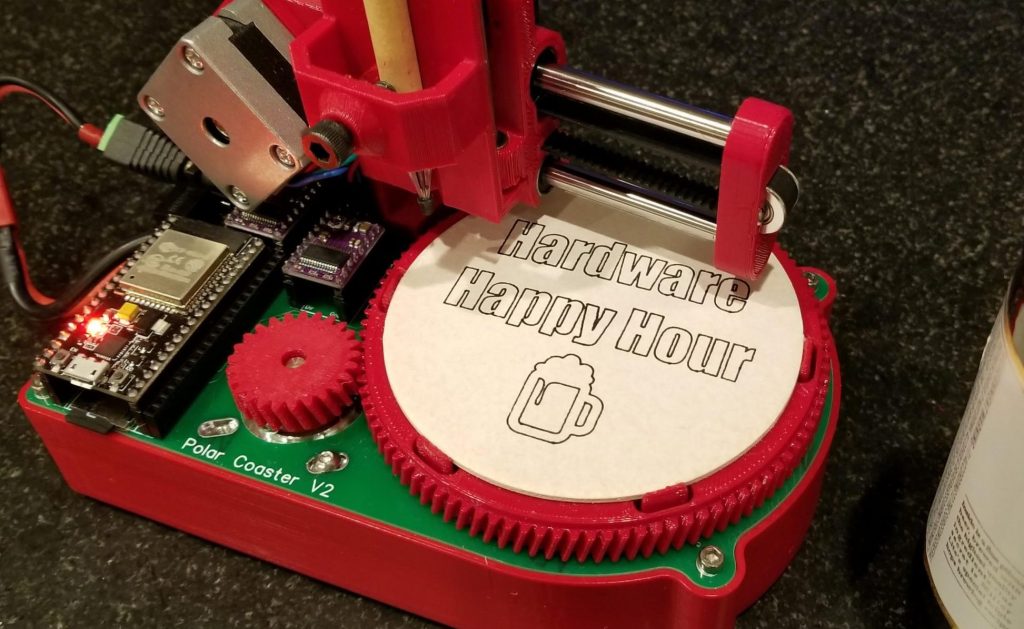
On the eve of Teardown 2026, Hardware Happy Hour Portland is happening tonight, July 23rd
Hardware Happy Hour is an informal way to socialize, show off your projects, and talk about the world of hardware. Join us for drinks, hacks, and snacks in the DreamTENT at Jupiter Original to celebrate the start of Teardown 2026.
Hardware Happy Hour is an informal way to socialize, show off your projects, and talk about the world of hardware. Join us for drinks, hacks, and snacks in the DreamTENT at Jupiter Original to celebrate the start of Teardown 2026. You do NOT need a Teardown 2026 ticket to join.
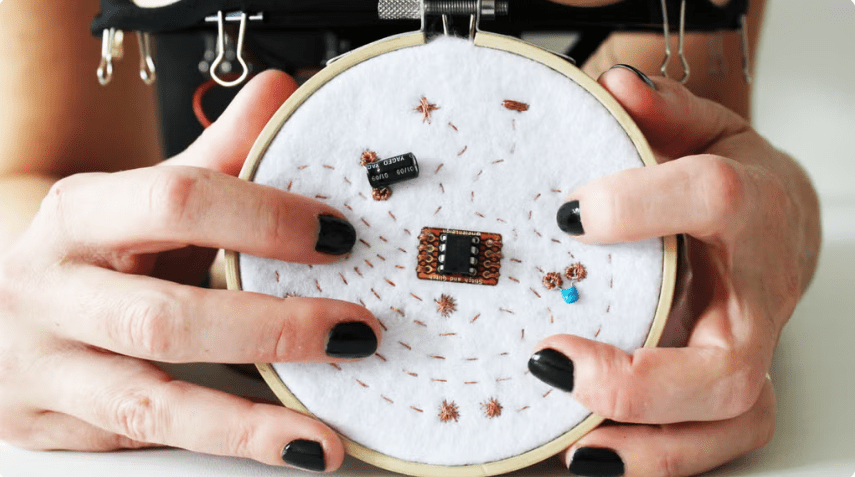
At Hardware Happy Hour Portland we welcome anyone interested in any kind of hardware from beginner to expert: Arduino DIYers, engineers, hardware start up founders, e-textile experimenters, LED-curious folks, 3D printing enthusiasts or robotics geeks.
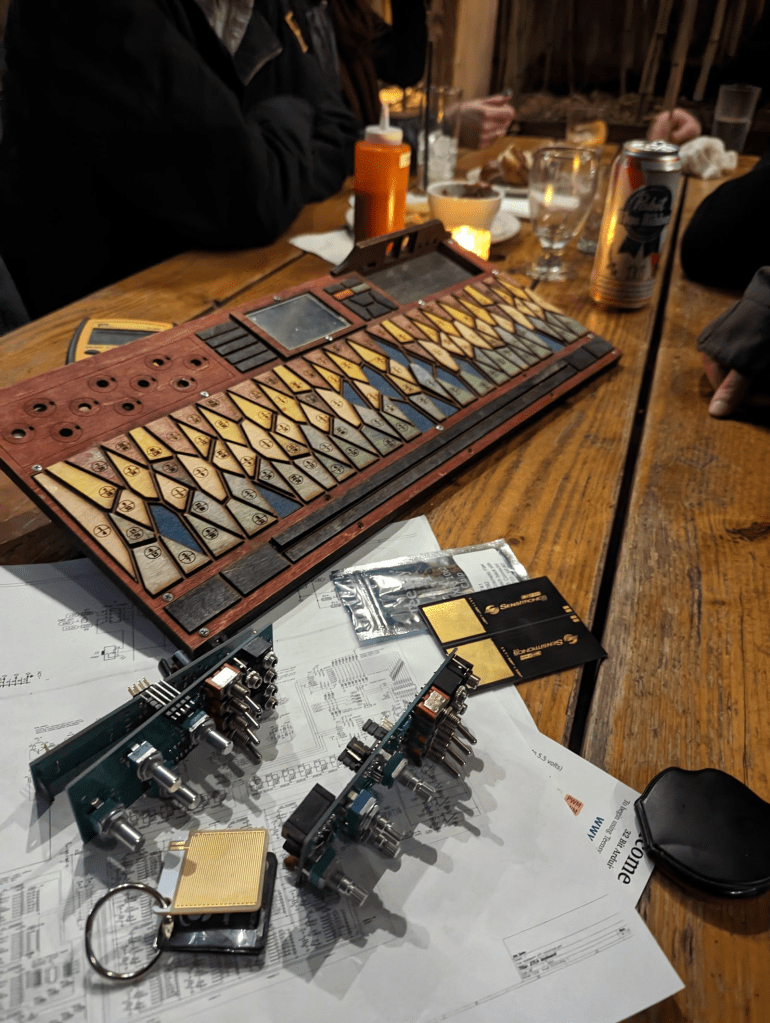
If you’re working on something even vaguely related please do bring it along. No presentations, no pitch decks, just projects and conversation.