From Jo Hinchliffe on the Tindie blog:
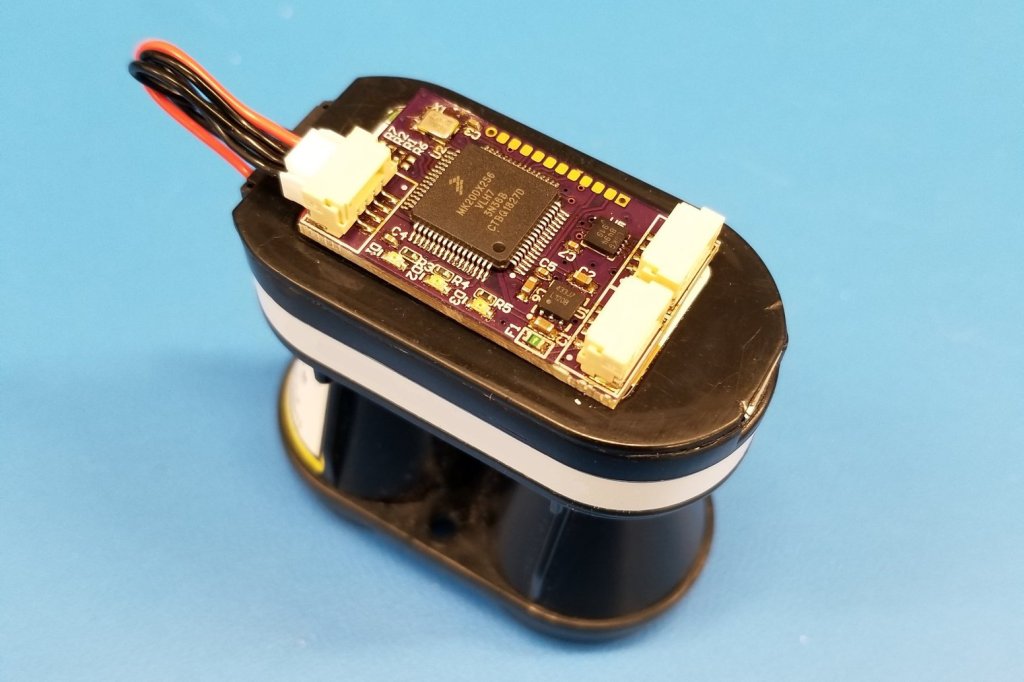
Do you want your UAV to make amazing autonomous landings? This laser interface board from Avionics Anonymous may well be just what you need.
Laser range finders can be useful on UAV as altimeters and can make autonomous landings easier to perform. However adding a laser range finder to your UAV can be a little tricky. You might want the laser to be positioned far away from your flight controller, meaning you don’t want to use I2C, and you might not have a serial port to spare. This interface board uses the robust CAN bus using to connect a range of popular Lightware lasers to the common Pixhawk autopilots and others.
The laser altimeter is utilising UAVCAN which is an opensource, MIT licensed, lightweight protocol designed for resilient intra-vehicular communications. The CAN bus can also be used to re-flash the firmware meaning if you change out your laser model you can still use this board. Supplied preconfigured for a laser of your choosing, this adaptor board is compact, lightweight and has numerous screw mounts designed to be easily removed if space is short and you want to mount it directly with double sided tape.