AndiceLabs writes about a fixed-wing autopilot project:
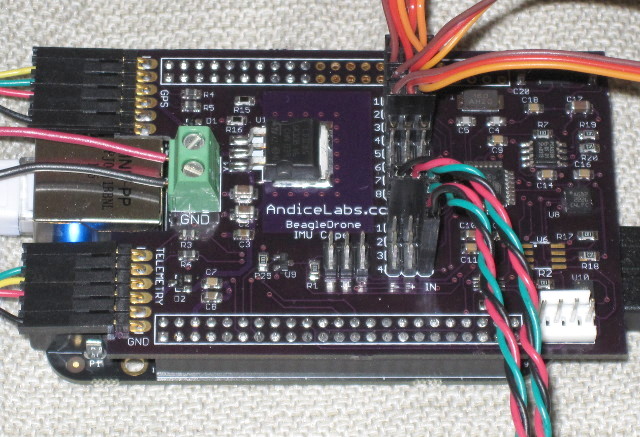
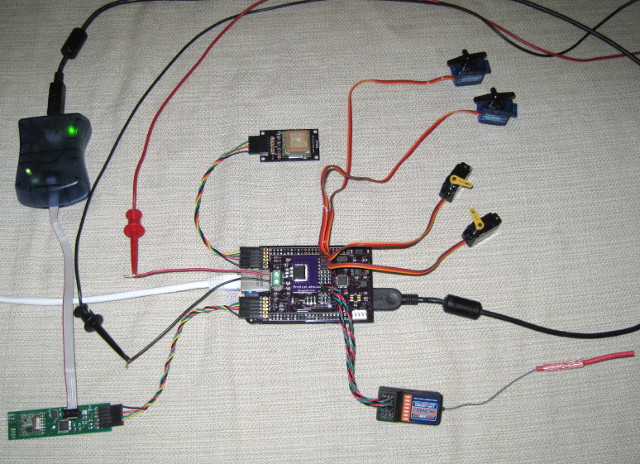
The BeagleDrone is fixed-wing autopilot project based on the BeagleBone and the IMU cape. The IMU cape provides a 3-axis magnetometer, accelerometer, gyro and a barometer on the BeagleBone’s I2C bus. There is also an AVR micro on the I2C bus that handles output pulse timing of the 8 servo channels and input pulse timing on the 4 radio signal channels. Two of the BeagleBone’s UARTs are exposed via FTDI-compatible connectors to allow connection of external modules like GPS and telemetry. It also has a regulator that provides 5VDC for the BeagleBone, AVR, and servos from the RC battery.
The BeagleBone provides the power of Linux in a footprint that is acceptable for RC and the Black has now made the platform even more affordable. With Linux’s extensive libraries and utilities almost any feature should be quickly realizable and development enjoyable. And unlike an autopilot powered by an 8 or 16 bit micro-controller, there is no need to worry about code and data size or overloading the processor with whatever crazy navigation features you can dream up.
I enjoy flying electric RC planes whenever I get the chance and building a fixed-wing autopilot for the BeagleBone has been on my list for a while now. Of course, there’s no reason that the BeagleBone couldn’t also control a multi-rotor aircraft. A flying Linux box is going to have very few limitations!