Sarah Petkus is a robot mom (which means she’s the mother to a robot, not that Sarah herself is a robot, at least as far as we’re aware), whose child, Noodle Feet, is a character in Sarah’s graphic novel Gravity Road. Unlike every other robot on the planet, Noodle Feet is a content-based robot. Instead of…
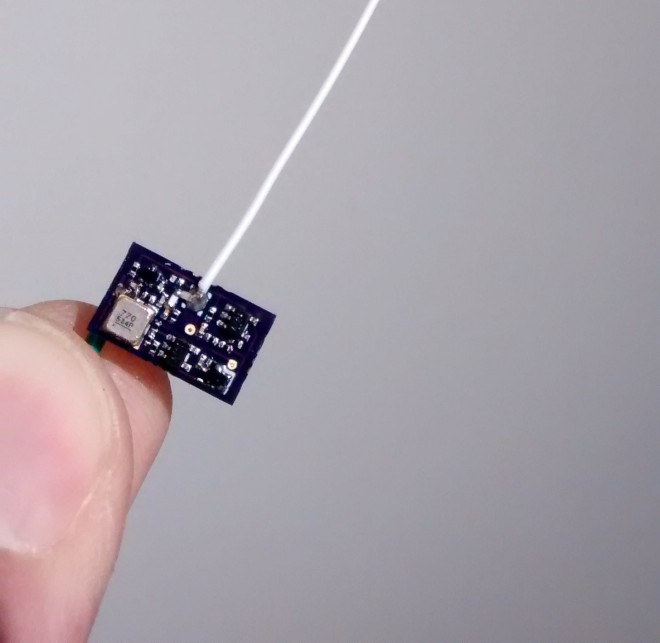
It is a staple of spy movies. The hero — or sometimes the bad guy — sticks a device never any bigger than an Alka Seltzer to a vehicle or a person and then tracks it anywhere it goes in the world. Real world physics makes it hard to imagine a device like that for…
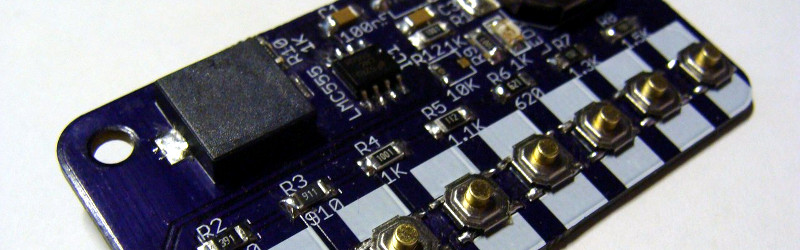
The 555 timer is one of that special club of integrated circuits that has achieved silicon immortality. Despite its advanced age and having had its functionality replicated and superceded in almost every way, it remains in production and is still extremely popular because it’s simply so useful. If you are of A Certain Age a…
2017.12.03 0.100″ proto boards are readily available and great for prototyping with 1980’s DIP thru-hole technology. Trying to use them with 1990s and newer surface mount devices is like picking your teeth with a log however. 0.050″ pitch vias line up perfectly with SOIC ICs, SOT-23s and 0603s passives but for whatever reason proto boards […]
2017.12.19 : Black Mesa Labs is presenting an open-source-hardware USB 3.0 to FPGA PMOD interface design. First off, please lower your expectations. USB 3.0 physical layer is capable of 5 Gbps, or 640 MBytes/Sec. This project can’t provide that to your FPGA over 2 PMOD connectors – not even close. It does substantially improve PC […]
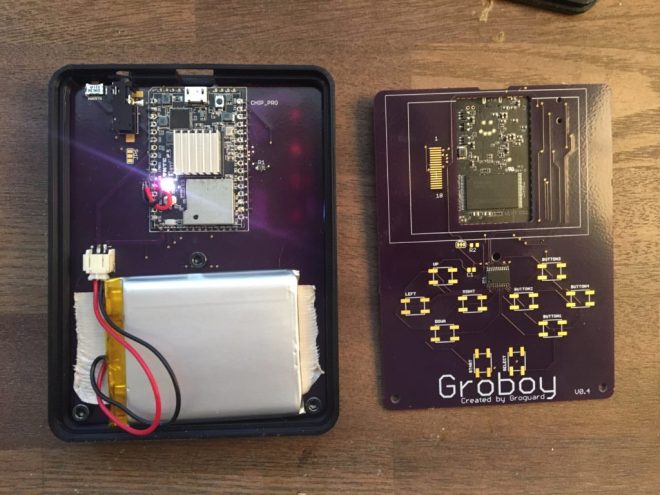
Groboy, created by Groguard, is a C.H.I.P. Pro-powered handheld system designed to run retro console emulators and games on the go.
It’s also a testament to the open source community, readily available data sheets and manufacturing houses, and the tenacity to teach yourself engineering. Groguard, like many of us, is self-taught and pursuing his passion for making through custom projects.
After 4 revisions of the board, Groguard had the design where he wanted it. The custom OSH Park PCB at the heart of Groboy routes signal lines from the 2.8″ TFT display, headphones jack, internal 2500mAh LiPo battery (he estimates 3-5 hours of battery life, though he’s not rigorously tested it), and the PCA9555 I2C GPIO expander, which manages inputs from the 11 onboard buttons, to the respective input and output pins on C.H.I.P. Pro.
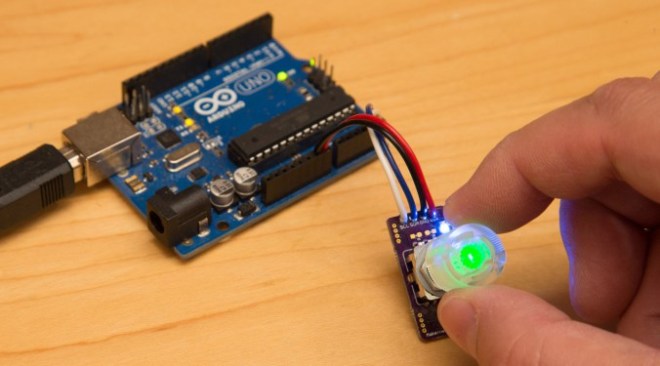
Makernet Knob’s makes the point that “Rotary encoders are cool but hard to wire into your projects.” Having wired up a custom input device for my computer using an encoder, I can attest to both of these statements. In my case, it took me quite a bit of time simply to figure out how each encoder pin was used!
You never know what people will do with your ideas, and it is always fun to see someone do something I would have never thought off with them. I got a video from someone who built myProgrammable Fidget Spinner, and used a leaf blower to see how fast they could get it to go. Fortunately, they were wearing safety glasses, and no, it didn’t come flying apart. It did, however, start displaying erratically at about 3600 RPM (the fastest I can get it by hand is just under 2000 RPM).
So, what is going on? TLDR: I figured it out and fixed it, and here is proof.
Three years ago, as a student under the Google Summer of Code program for BeagleBoard.org, I developed BeagleLogic – that turned the BeagleBone Black and its variants into a Logic Analyzer using the Programmable Real-Time Units (PRUs) on the AM335x SoC to capture up to 14 inputs up to 100 MSamples/sec. It is possible to fill up to 300MB of the 512MB DDR RAM in the BeagleBone with logic samples – that’s 3 seconds of data at 8 channels (1.5 secs at 16 channels). I also designed a cape for the system – called the BeagleLogic cape that would allow buffering the external logic signals up to 5V TTL so that they do not damage the BeagleBone.
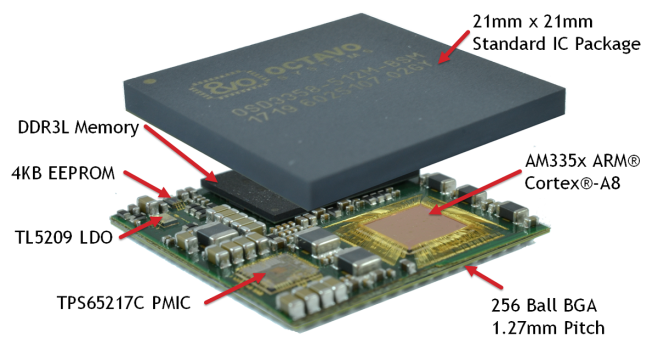
The launch of Octavo Systems and its OSD3358 SiP got me excited, and the idea of a turnkey version of BeagleLogic was rekindled as the design would be greatly simplified due to the SiP integrating the core components, leaving me to focus on the features I want to add to the system.
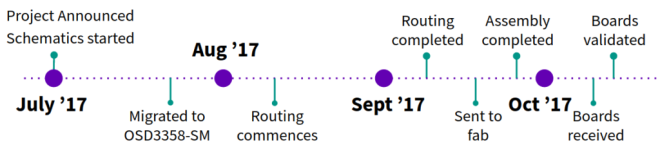
From concept to completion, this project took 4 months working on it part-time. I relocated in August so work happened at an even slower pace during that month
The schematics were originally based on the OSD3358, however Jason encouraged me to design based on the newly announced OSD3358-SM as it was smaller and had a more optimized ballmap. The schematics were then migrated to the OSD3358-SM in late July. At the beginning of the routing exercise, I was really apprehensive if the design could be routed in 4 layers but thanks to the optimized ball map of the OSD3358-SM, the routing was easily completed so.