Bela is a real-time audio processing platform based on the BeagleBone. This course is a deep dive into how Bela processes data, and how to implement real-time audio and interaction:
Our YouTube course, C++ Audio Programming with Bela, started in Spring 2020 when the world went into lockdown and we wanted to create something to help people learn at home. This popular, in-depth course is great for newcomers to C++ and audio programming, as well as people who want to brush up on their skills.
In this series Bela founder Andrew McPherson takes you through the basics of digital audio and real-time programming, with hands-on examples and clear, accessible explanations, giving you skills you can use. The course is free and open to all.
To celebrate our 10 year anniversary and our love of cool hardware hacks, join us for a #BringAHack event in the Big Apple! Join BeagleBoard.org for a casual evening of drinks, snacks and hacks at the Leaf Bar the night before Maker Faire New York.
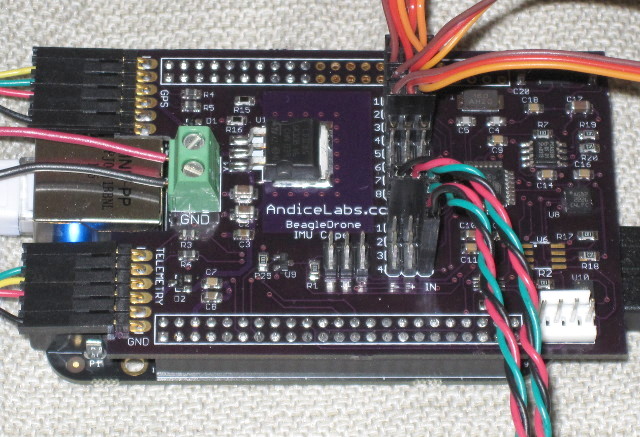
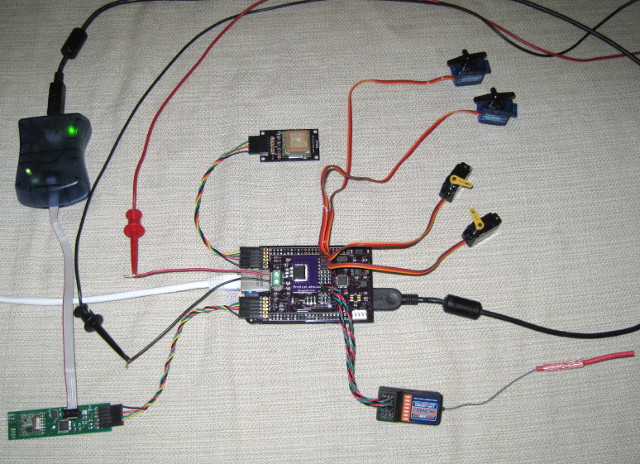
The BeagleDrone is fixed-wing autopilot project based on the BeagleBone and the IMU cape. The IMU cape provides a 3-axis magnetometer, accelerometer, gyro and a barometer on the BeagleBone’s I2C bus. There is also an AVR micro on the I2C bus that handles output pulse timing of the 8 servo channels and input pulse timing on the 4 radio signal channels. Two of the BeagleBone’s UARTs are exposed via FTDI-compatible connectors to allow connection of external modules like GPS and telemetry. It also has a regulator that provides 5VDC for the BeagleBone, AVR, and servos from the RC battery.
The BeagleBone provides the power of Linux in a footprint that is acceptable for RC and the Black has now made the platform even more affordable. With Linux’s extensive libraries and utilities almost any feature should be quickly realizable and development enjoyable. And unlike an autopilot powered by an 8 or 16 bit micro-controller, there is no need to worry about code and data size or overloading the processor with whatever crazy navigation features you can dream up.
I enjoy flying electric RC planes whenever I get the chance and building a fixed-wing autopilot for the BeagleBone has been on my list for a while now. Of course, there’s no reason that the BeagleBone couldn’t also control a multi-rotor aircraft. A flying Linux box is going to have very few limitations!
It’s understood that 3D printers and CNC machines need to control motors, but there are a few other niceties that are always good to have. It would be great if the controller board ran Linux, had support for a nice display, and had some sort of networking. The usual way of going about this is either driving a CNC machine from a desktop, or by adding a Raspberry Pi to a 3D printer.
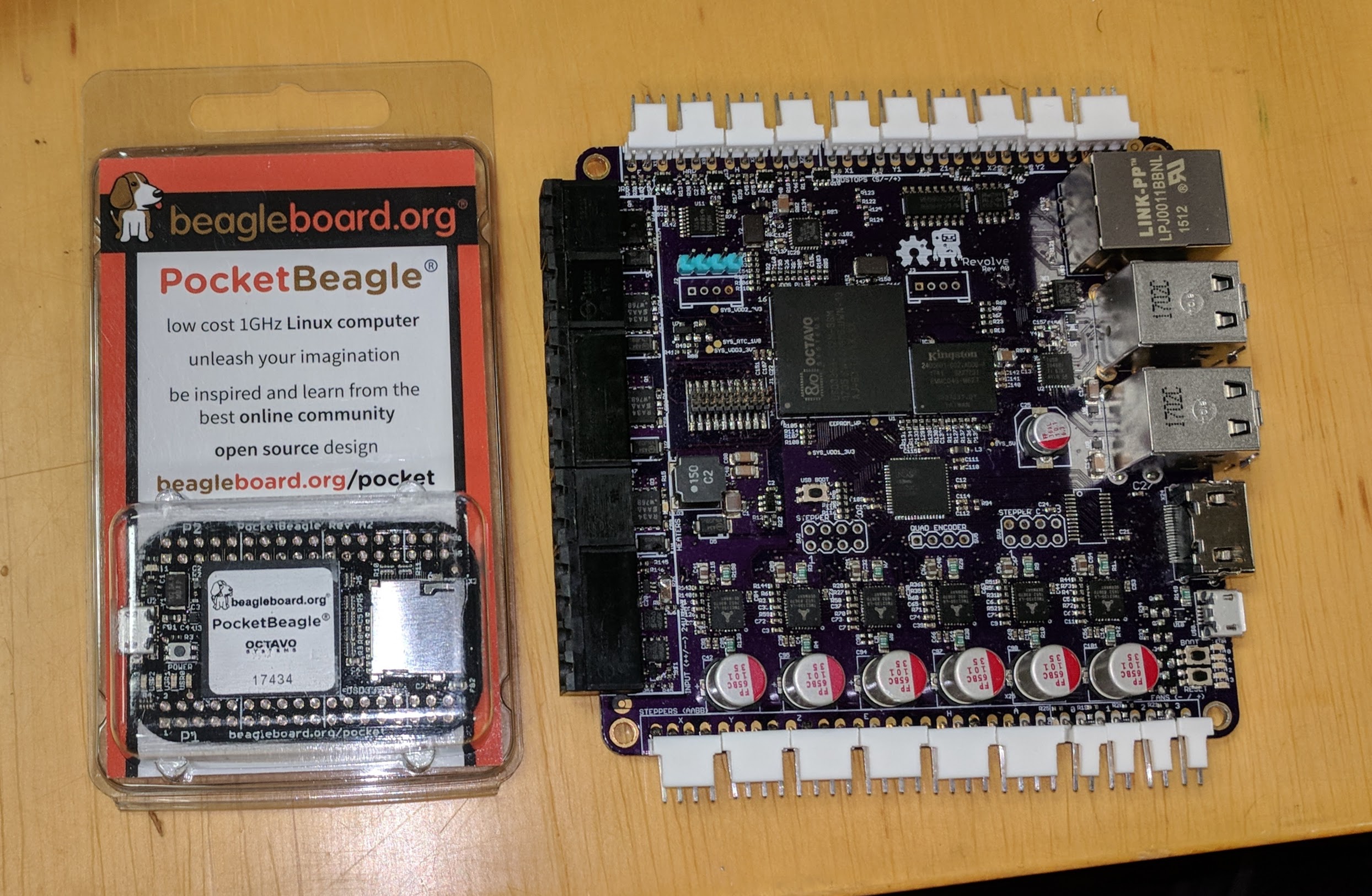
The best solution to this problem is to just drive everything from a BeagleBone. This will give you Linux, and with a few motor drivers you can have access to the fancy PRUs in the BeagleBone giving you fast precise control. For the last few years, the Replicape has been the board you need to plug a BeagleBone into a few motors. Now, there’s a better, cheaper solution. At the Midwest RepRap Festival this weekend, [Elias Bakken] has unveiled the Revolve, a single board that combines Octavo Systems’ OSD3358 ‘BeagleBone On A Chip’ with silent TMC2130 motor drivers from Trinamic. It’s an all-in-one 3D printer controller board that runs Linux.
The specs for the Revolve are more or less exactly what you would expect for a BeagleBone with a 3D printer controller. The main chip is the Octavo Systems OSB3358, there are six TMC2130 stepper drivers from Trinamic connected directly to the PRUs, 4 GB of eMMC, 4 USB host ports, 10/100 Ethernet, 1080p HDMI out, and enough headers for all the weird and wonderful 3D printers out there. The software is based on Redeem, a daemon that simply turns G-code into spinning motors and switching MOSFETs.
The price hasn’t been set, but [Elias] expects it to be somewhere north of $100, and a bit south of $150. That’s not bad for a board that effectively does everything from online printer monitoring to real-time motion control. There’s no date for the release of this board, but as with most things involving 3D printer, the best place to check for updates is Google+.
You can also checkout the official product page for more info:
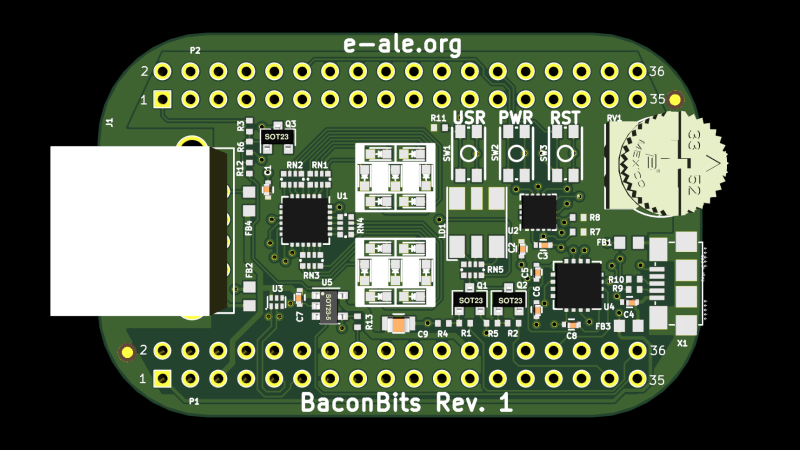
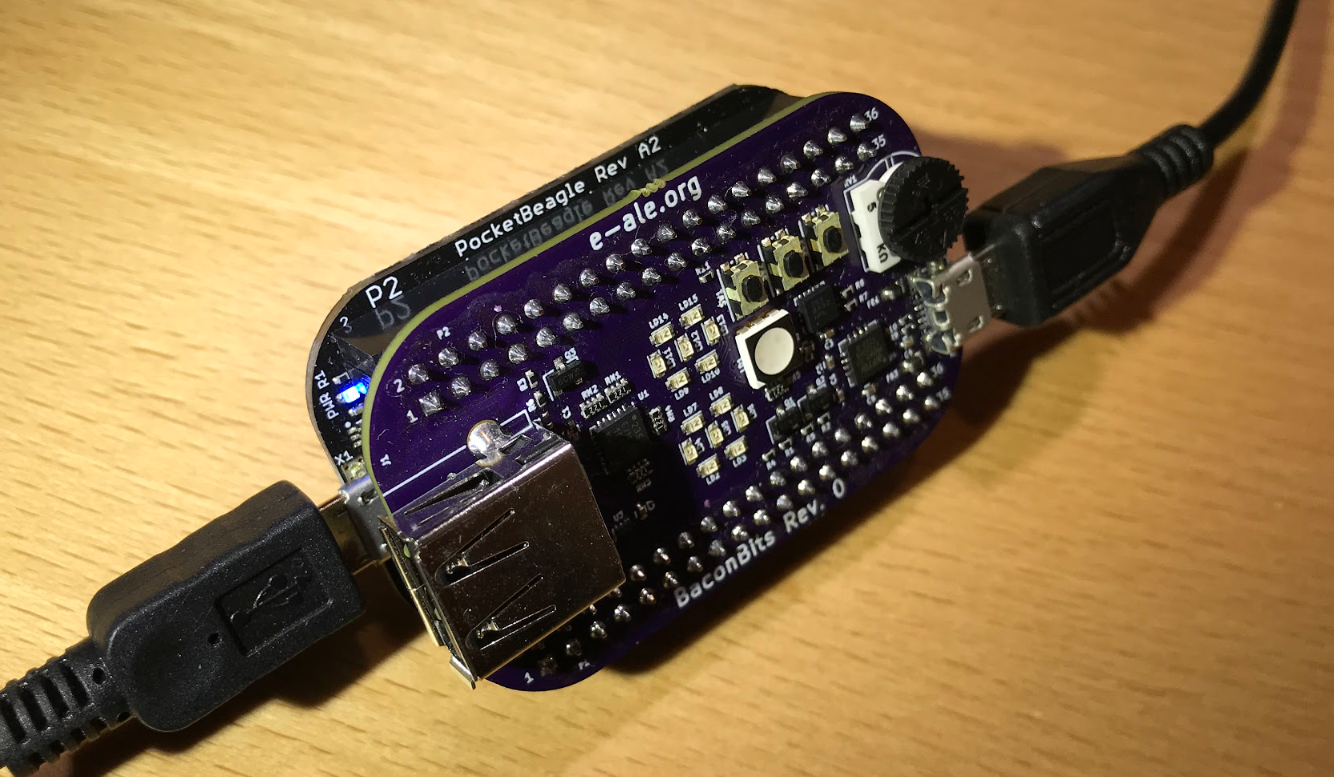
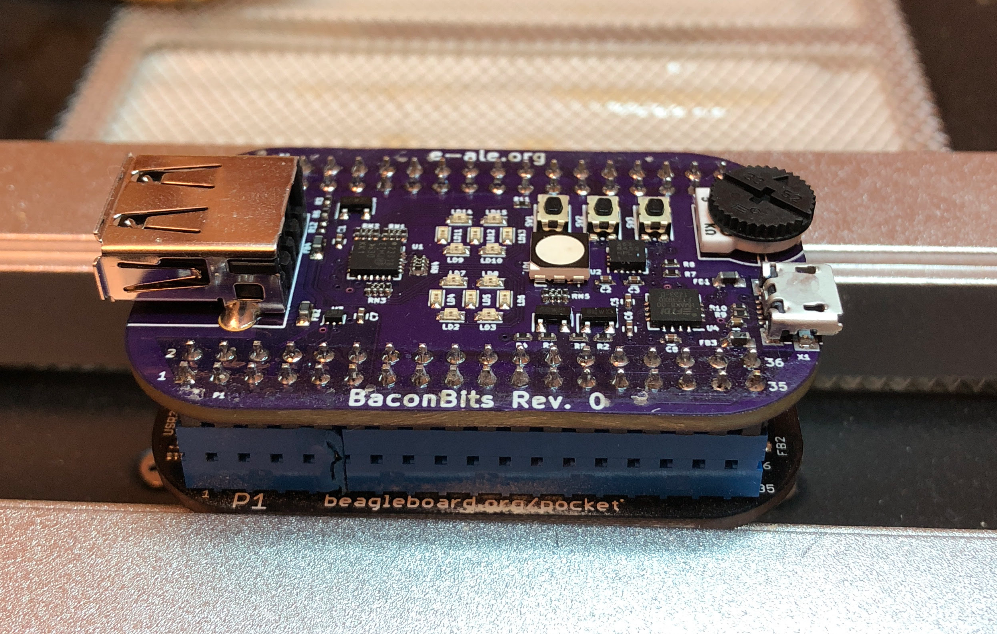
The PocketBeagle single-board computer is now a few months old, and growing fast like its biological namesake. An affordable and available offering in the field of embedded Linux computing, many of us picked one up as an impulse buy. For some, the sheer breadth of possibilities can be paralyzing. (“What do I do first?”) Perhaps a development board can serve as a starting point for training this young puppy? Enter the BaconBits cape.
When paired with a PocketBeagle, everything necessary to start learning embedded computing is on hand. It covers the simple basics of buttons for digital input, potentiometer for analog input, LEDs for visible output. Then grow beyond the basics with an accelerometer for I²C communication and 7-segment displays accessible via SPI. Those digging into system internals will appreciate the USB-to-serial bridge that connects to PocketBeagle’s serial console. This low-level communication will be required if any experimentation manages to (accidentally or deliberately) stop PocketBeagle’s standard USB network communication channels.
BaconBits were introduced in conjunction with the E-ALE (embedded apprentice Linux engineer) training program for use in hands-on modules. The inaugural E-ALE session at SCaLE 16X this past weekend had to deal with some last-minute hiccups, but the course material is informative and we’re confident it’ll be refined into a smooth operation in the near future. While paying for the class will receive built hardware and in-person tutorials to use it, all information – from instructor slides to the BaconBits design – is available on Github. Some of us will choose to learn by reading the slides, others will want their own BaconBits for independent experimentation. And of course E-ALE is not the only way to learn more about PocketBeagle. Whichever way people choose to go, the embedded Linux ecosystem will grow, and we like the sound of that!
Are you an Embedded Engineer who is transitioning to using Linux? Attend seminars on how to start with using Linux for Embedded Applications. The Embedded Apprentice Linux Engineer program provides a place at existing Embedded conferences where you can get your questions answered.
Embedded Apprentice Linux Engineer Hands on Workshops at SCALE 16x in Pasadena from Thursday, March 8th to Saturday, March 10th:
All the Embedded Apprentice Linux Engineer classes will involve using embedded hardware during the hands-on labs with the PocketBeagle and a BaconBits cape which are included with the $75 USD registration fee for E-ALE at SCaLE61x and ELC.
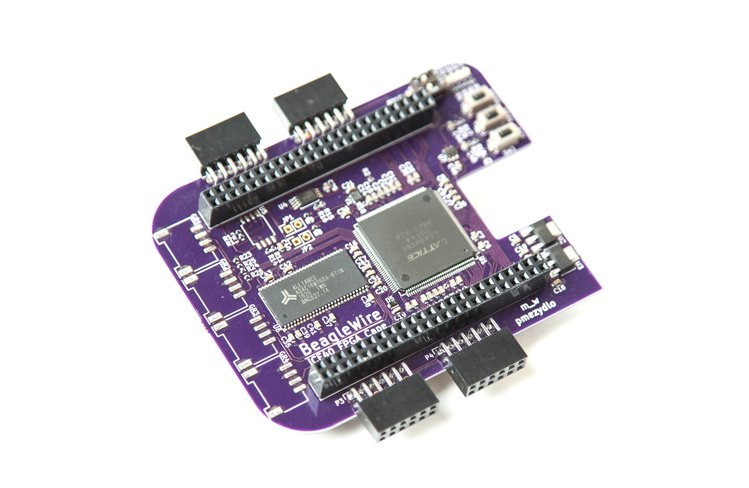
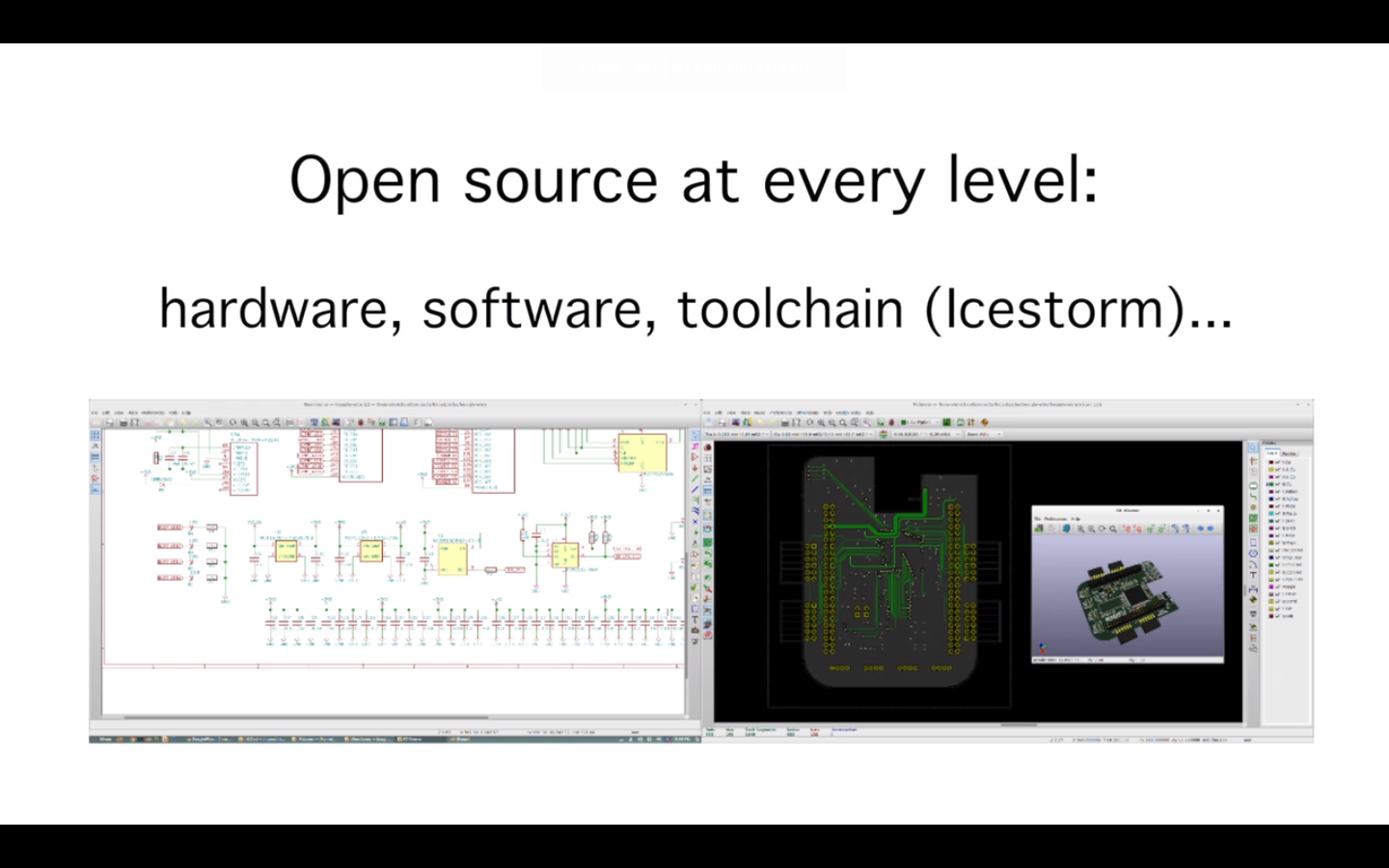
BeagleWire is a completely open source FPGA development board. Unlike most other FPGA dev boards, the BeagleWire’s hardware, software, and FPGA toolchain are completely open source. The BeagleWire is a Beaglebone compatible cape leveraging the Lattice iCE40HX FPGA.
BeagleWire can be easily expanded by adding additional external modules for example, modules for high speed data acquisition, software defined radio, and advanced control applications. Using well-known connectors like Pmod and Grove makes it possible to connect various interesting external modules widely available in stores. Owing to this, prototyping new imaginative digital designs is easier.
Three years ago, as a student under the Google Summer of Code program for BeagleBoard.org, I developed BeagleLogic – that turned the BeagleBone Black and its variants into a Logic Analyzer using the Programmable Real-Time Units (PRUs) on the AM335x SoC to capture up to 14 inputs up to 100 MSamples/sec. It is possible to fill up to 300MB of the 512MB DDR RAM in the BeagleBone with logic samples – that’s 3 seconds of data at 8 channels (1.5 secs at 16 channels). I also designed a cape for the system – called the BeagleLogic cape that would allow buffering the external logic signals up to 5V TTL so that they do not damage the BeagleBone.
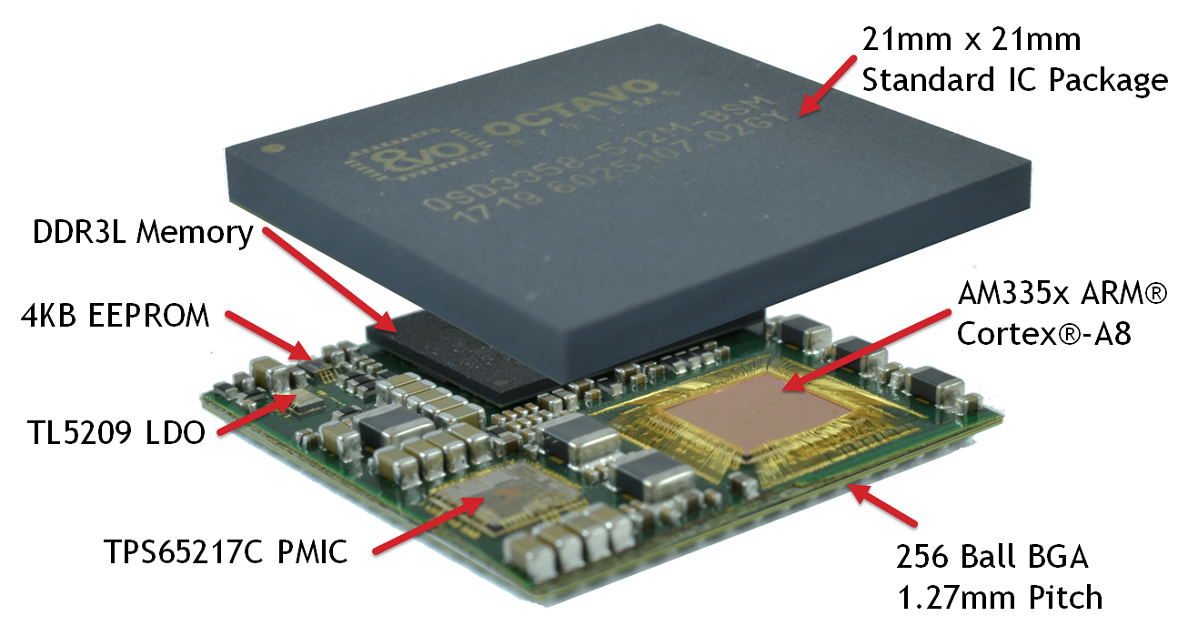
The launch of Octavo Systems and its OSD3358 SiP got me excited, and the idea of a turnkey version of BeagleLogic was rekindled as the design would be greatly simplified due to the SiP integrating the core components, leaving me to focus on the features I want to add to the system.
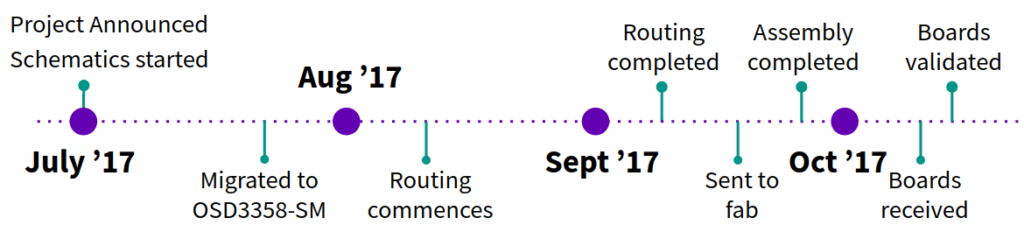
From concept to completion, this project took 4 months working on it part-time. I relocated in August so work happened at an even slower pace during that month
The schematics were originally based on the OSD3358, however Jason encouraged me to design based on the newly announced OSD3358-SM as it was smaller and had a more optimized ballmap. The schematics were then migrated to the OSD3358-SM in late July. At the beginning of the routing exercise, I was really apprehensive if the design could be routed in 4 layers but thanks to the optimized ball map of the OSD3358-SM, the routing was easily completed so.